Tesla apresenta Optimus V3 e destaca foco em testes internos
Por Brian Wang · 2026-04-04
Tesla destaca o Optimus V3, testes internos e simulação própria. Veja por que hardware e tendões são chave na robótica humanoide.
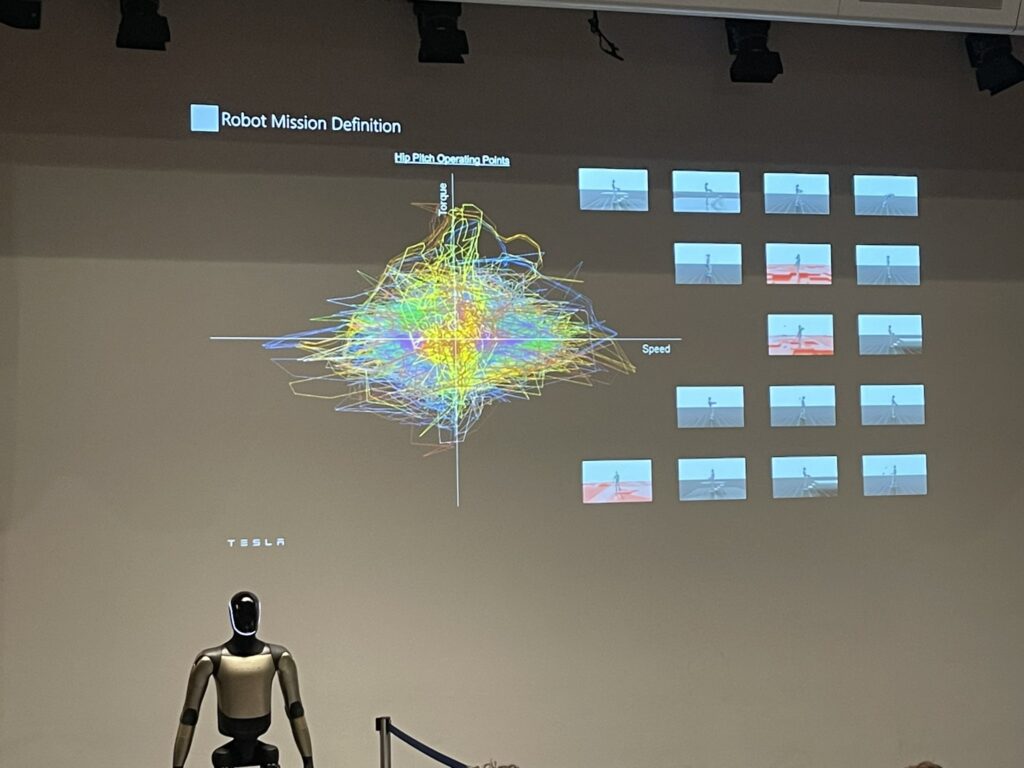
A Tesla voltou ao centro das discussões sobre robótica humanoide após comentários feitos por Konstantinos Laskaris, diretor líder do projeto Optimus, durante uma palestra no ETH Robotics Club INSPIRE Talk, na Suíça. De acordo com os trechos destacados da apresentação, o executivo defendeu que o caminho para robôs mais capazes passa menos por depender apenas de grandes volumes de dados e mais por entender profundamente o hardware, a física e os métodos de simulação. A fala também trouxe indicações sobre a próxima geração do robô da empresa, o Optimus V3, que, segundo o relato, deve ser produzida primeiro para uso interno da própria Tesla.
O conteúdo da palestra reforça uma linha de pensamento que vem ganhando espaço entre pesquisadores e empresas de robótica: a ideia de que a inteligência artificial aplicada ao mundo físico não pode ser tratada da mesma forma que modelos treinados apenas em texto, imagem ou vídeo. Em robôs humanoides, o desempenho depende do equilíbrio entre software, controle, mecânica, sensores e capacidade de interação com o ambiente real. Nesse contexto, a Tesla está posicionando o Optimus não apenas como um produto futuro, mas como uma plataforma de desenvolvimento contínuo, com aprendizado orientado para tarefas concretas.
O que a Tesla destacou sobre o Optimus
Entre os principais pontos atribuídos à fala de Laskaris está a crítica à noção de que existe um grande “sim-to-real gap”, expressão usada na robótica para descrever a diferença entre o comportamento de um sistema em simulação e o seu desempenho em condições reais. Segundo o executivo, esse não seria um problema inevitável, mas um sinal de que o robô talvez não tenha sido modelado corretamente desde o início. A mensagem sugere que, para a Tesla, a simulação precisa refletir com mais precisão a realidade física do robô e seu ambiente de operação.
Outro ponto enfatizado foi a importância do hardware. A visão apresentada indica que, em robótica humanoide, a limitação mecânica pode ser tão importante quanto, ou até mais importante do que, o volume de dados usado no treinamento. A lógica é simples: se o robô não consegue reproduzir certos movimentos ou forças no mundo físico, nenhuma quantidade de dados resolverá sozinha essa deficiência. Trata-se de uma afirmação relevante para um setor em que muitas vezes o foco público recai apenas sobre algoritmos e modelos de inteligência artificial.
A palestra também destacou as mãos acionadas por tendões como a solução preferida para o Optimus. No relato, foi dito que sistemas baseados apenas em motores não conseguiriam reproduzir a densidade de força muscular humana. Em termos práticos, isso significa buscar mecanismos de atuação que se aproximem do funcionamento biomecânico do corpo humano, permitindo tanto delicadeza em tarefas finas quanto força em atividades mais exigentes. A escolha aponta para um desafio clássico da robótica: unir precisão, sensibilidade e robustez em um mesmo sistema.
O que significa a discussão sobre simulação e física
O debate sobre simulação é central no desenvolvimento de robôs, porque é muito mais rápido e barato testar comportamentos virtuais do que colocar máquinas físicas em ambientes reais repetidamente. Simulações permitem experimentar cenários, corrigir erros e treinar controle sem os custos e riscos de desgaste do equipamento. No entanto, quando a simulação não representa bem massas, atritos, deformações, velocidades e respostas dos atuadores, o que funciona no ambiente virtual pode falhar no mundo físico.
Ao afirmar que o problema não é um “gap” inevitável, mas uma falha de modelagem, a Tesla sinaliza uma abordagem mais rigorosa de engenharia. Em vez de aceitar que a passagem do virtual para o real sempre produzirá perdas significativas, a empresa defende que os modelos computacionais devem ser construídos com fidelidade suficiente para reproduzir o comportamento desejado. Isso envolve compreender melhor a física do sistema, criar ferramentas próprias quando necessário e ajustar a simulação para o nível de detalhe que o robô exige.
Esse ponto também explica a menção à criação de uma simulação própria. O executivo teria sugerido que a comunidade não deve se limitar ao que já existe no mercado, mas sim desenvolver o ambiente computacional necessário para o tipo de robô que deseja construir. Em robótica avançada, isso faz sentido porque diferentes máquinas têm geometrias, limites de movimento e sistemas de controle muito específicos. Uma simulação genérica pode ser suficiente para estudos iniciais, mas raramente resolve todos os requisitos de um robô humanoide comercialmente viável.
Optimus V3 e a estratégia de uso interno
Outro destaque importante da notícia é a menção ao Optimus V3, descrito como “próximo” e com uma estratégia de distribuição diferente das expectativas comuns do mercado. Segundo o texto, essa versão não será vendida ao público e também não irá para fábricas externas como produto comercializado. O primeiro cliente, nesse caso, seria a própria Tesla. A empresa estaria montando uma espécie de “Bot Academy”, um ambiente seguro em que os robôs podem aprender tarefas do zero, com exemplos como segurar e operar uma furadeira.
Essa estratégia revela uma lógica de desenvolvimento que prioriza controle, validação e aprendizado em ambiente restrito antes de qualquer tentativa de escala comercial. Em vez de lançar o robô diretamente para consumidores ou clientes industriais, a empresa parece apostar em um período inicial de uso interno, no qual o sistema pode ser testado em tarefas reais, com supervisão e objetivos bem definidos. Na prática, isso reduz riscos e permite observar onde o robô precisa evoluir em capacidades mecânicas, percepção e autonomia.
O uso interno também pode ter um papel estratégico para a própria Tesla, já que permite aplicar o robô em processos controlados e colher dados mais relevantes para seu aprimoramento. No setor de robótica, a fase de prova de valor costuma ser longa, especialmente quando o objetivo é operar em ambientes variáveis, como linhas de produção, armazéns ou espaços com pessoas. Por isso, começar por uma academia de tarefas pode ser uma forma de construir competência operacional antes de ampliar o alcance do projeto.
Por que as mãos são tão importantes na robótica humanoide
Uma das afirmações mais técnicas do material diz respeito às mãos acionadas por tendões. A ideia de usar tendões, em vez de depender apenas de motores diretamente acoplados, está associada à busca por maior flexibilidade e melhor distribuição de força. Em termos simples, a mão humana realiza movimentos extremamente complexos porque combina articulações, músculos, tendões e controle neural refinado. Reproduzir essa complexidade em uma máquina é um dos maiores desafios da robótica moderna.
Quando a Tesla afirma que motores sozinhos não conseguem reproduzir a densidade de força muscular humana, a empresa está apontando para uma limitação física, não apenas de engenharia de software. Isso significa que a arquitetura mecânica influencia diretamente quais tarefas o robô poderá executar. Segurar objetos frágeis, ajustar peças pequenas, levantar itens pesados ou operar ferramentas exigem diferentes níveis de força, aderência e precisão. Sem uma estrutura adequada, o robô pode até ser inteligente, mas continuará limitado no mundo real.
Esse tipo de solução também ajuda a explicar por que a robótica humanoide continua tão desafiadora. Não basta dar ao robô aparência humana; é preciso desenvolver um conjunto de capacidades funcionais que permita movimentos coerentes com os do corpo humano. O design da mão, do pulso e dos sistemas de atuação acaba sendo tão relevante quanto o modelo de IA que comandará os movimentos. Por isso, a discussão sobre hardware não é acessória, mas central no progresso da área.
Impactos para o mercado de robótica e para a indústria
As declarações associadas ao Optimus mostram como a robótica humanoide está entrando em uma fase mais concreta de engenharia e menos dependente de promessas abstratas. Se a Tesla realmente avançar com um modelo de aprendizado interno e uso restrito antes da comercialização, isso pode reforçar uma tendência no setor: primeiro provar capacidade operacional em tarefas controladas, depois pensar em distribuição mais ampla. Essa abordagem é comum em tecnologias de fronteira, nas quais a confiabilidade é decisiva.
Para a indústria, o possível impacto está na forma como robôs humanoides poderão ser integrados a ambientes de trabalho. Tarefas como manuseio de ferramentas, suporte em montagem, movimentação de peças e outras atividades repetitivas são frequentemente citadas como candidatas naturais à automação. Ainda assim, o caminho até uma adoção ampla depende da estabilidade dos sistemas, da segurança no contato com pessoas e da capacidade de operar em cenários não padronizados. A notícia reforça que a Tesla está tratando esses desafios de maneira incremental.
Para o mercado, também chama atenção a estratégia de não transformar a nova geração do Optimus em um produto voltado diretamente ao consumidor ou às fábricas de terceiros. Isso sugere uma postura mais cautelosa, na qual o valor do projeto está primeiro na maturação tecnológica. Se confirmada, essa postura pode influenciar a percepção sobre prazos de adoção de robôs humanoides em larga escala, mostrando que ainda existe uma distância considerável entre demonstrações e implantação comercial ampla.
No campo da inteligência artificial, a fala reforça uma tese importante: a próxima etapa da IA aplicada ao mundo físico depende tanto de algoritmos quanto de engenharia mecânica e modelagem precisa. À medida que empresas buscam robôs mais capazes, a integração entre simulação, hardware e aprendizado em ambientes reais tende a se tornar o diferencial mais relevante. A notícia sobre o Optimus mostra exatamente esse movimento, em que o foco deixa de ser apenas o que o sistema “entende” e passa a incluir o que ele é capaz de fazer com confiabilidade.
Uma síntese do momento do Optimus
Os trechos divulgados da palestra de Konstantinos Laskaris indicam que a Tesla está tratando o Optimus como um projeto de robótica profundamente ligado à física do movimento e ao desenvolvimento de infraestrutura própria de aprendizado. A crítica ao suposto abismo entre simulação e realidade, a defesa de soluções mecânicas baseadas em tendões e a ideia de uma academia interna para treinar o robô mostram um esforço para construir um sistema mais integrado e mais próximo de tarefas do mundo real.
Ao mesmo tempo, a menção ao Optimus V3 como uma versão inicialmente restrita ao uso interno sugere que a empresa ainda está na fase de consolidação tecnológica. Em um setor em que promessas costumam avançar mais rápido do que a capacidade prática, esse tipo de estratégia pode ser interpretado como um sinal de prioridade para aprendizado e validação. O desdobramento mais relevante, portanto, não está apenas no anúncio de uma nova versão, mas na forma como a Tesla parece organizar o caminho para levar a robótica humanoide de demonstrações a aplicações consistentes.
Referência: https://www.nextbigfuture.com/2026/04/tesla-optimus-talk.html
Sobre o autor
Brian Wang — Conteúdo revisado pela equipe editorial do GeraDocumentos, com foco em IA, produtividade e criação de documentos profissionais.